MBOT - Suiveur de ligne
1. Introduction
Salut l’ami !
Si tu te retrouves ici, c’est que tu as en ta possession un Robot mBot ! Félicitations ! Tu as l’âme d’un ingénieur prêt à surmonter tous les défis ! Partons à l’aventure dès à présent !
Ici, tu vas apprendre à ton robot à suivre une ligne.

C’est parti !
2. mBot suiveur de ligne
Dans cette activité tu vas apprendre à ton robot mBot à suivre une ligne noire en contraste avec un fond blanc.

Pour cela, tu vas employer le capteur de ligne qui fonctionne par émission infrarouge : soit la lumière est réfléchie et détectée lorsque la surface est claire, soit elle est absorbée par une surface sombre. 
Pour suivre la ligne noire, il faut diviser la détection en 4 principes :
→ Si le capteur détecte du noir, il avance ;
→ S’il détecte du blanc à gauche, il vire un tantinet à droite,
→ S’il en détecte à droite, il se dévie sur la gauche ;
→ S’il détecte du blanc aux deux endroits, il recule un petit peu.
Essaye de réfléchir à comment tu peux réaliser ce programme avant de passer à l’étape suivante.
Tu l’as sans doute deviné, il va falloir utiliser une instruction de condition de type « si … alors … ».
Plus précisément, « si je capte ceci, alors je fais cela ».
Les instructions de conditions font parties des blocs de contrôle (comme les boucles).

Pour ce qui est du capteur de ligne, l’instruction va se trouver dans la partie détection : Tu remarqueras qu’il y a quatre modes de captation : tout, aucun, gauche ou droite – comme ce que l’on avait établi précédemment. La distinction entre gauche et droite va permettre d’orienter correctement le robot. 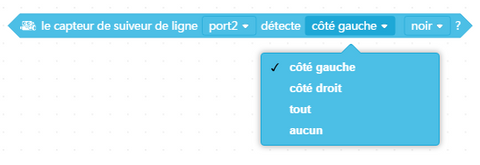
De même, il est possible de programmer le robot pour qu’il capte soit du noir, soit du blanc. 
D’ores et déjà, identifie le bon Port. En effet, vérifie que le port sélectionné sur l’ordinateur correspond bien au branchement du robot ; modifie en conséquence. 
Nous le disions plus tôt, il y a quatre blocs de condition à assembler :
→ Si je détecte du noir partout, j’avance ;
→ Si je détecte du blanc à gauche, je pivote légèrement à droite ;
→ Si je détecte du blanc à droite, je vire doucement à gauche ;
→ Si je détecte du blanc partout, je recule.

À toi de créer les quatre blocs successifs.
N’oublie pas que toutes ces instructions doivent faire parties d’un même bloc de boucle infinie pour que les tests soient effectués en permanence.

Enfin, comme lors de la première activité, le calibrage des vitesses risque d’être hasardeux. En effet, si le robot va trop vite, il peut dépasser de la ligne facilement et se retrouver bloquer bêtement. Au contraire, s’il ne va pas assez vite, il peut se retrouver immobiliser en plein milieu du parcours à cause d’une puissance insuffisante dans les moteurs lors d’un virage. À toi de peaufiner cela au mieux.
Exemple de programme avec des puissances hypothétiques :

3. Pour aller plus loin : mBot enfermé
Cette petite activité est le prolongement direct de la précédente et peut être réalisée dans le cas où ton circuit tracé forme une boucle ; c’est-à-dire un espace clos.
La mission se résume ainsi : mBot est enfermé derrière une clôture noire ; il se déplace linéairement dans son espace et s’il détecte la bordure, il s’en éloigne.
Concrètement, il suffit d’adapter le programme précédent au nouveau contexte :
→ Si je détecte du noir à gauche, je pivote légèrement à droite ;
→ Si je détecte du noir à droite, je vire doucement à gauche.
À toi de créer le programme adéquat !

À toi maintenant d’imaginer d’autres programmes et aventures pour continuer de t’amuser avec ton robot mBot !
N’hésite pas à le prendre en photo ou en vidéo et à les partager à la communauté SMARTEO.
À bientôt pour de nouveaux défis !
